 المجلس العربي للموهوبين والمتفوقين المجلس العربي للموهوبين والمتفوقين
المجلس العربي للموهوبين والمتفوقين المجلس العربي للموهوبين والمتفوقين
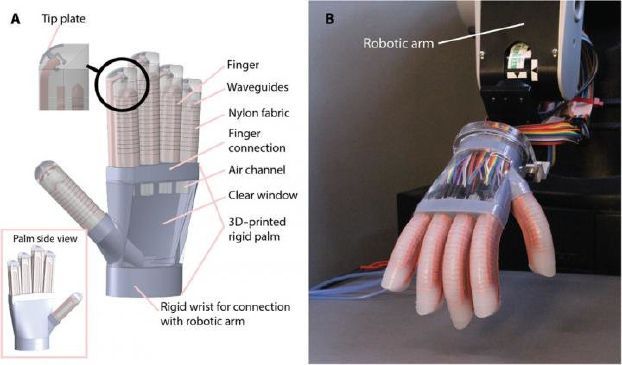
حقق التطور التقني أخيراً، طفرة في مجال الروبوتات، عندما ابتكر العلماء طريقة تجعل الروبوتات الرخوة (سوفت روبوت) تدرك محيطَها ضمنياً، عبر رسم تخطيطي للهيكل ومكوناته، بعدما كانت تعتمد اللّمس والإدراك باستخدام وسائل آليّة قد تكونُ ضخمة وصلبة. وقال الباحث الرئيس في مخبر الروبوتات العضوية روبيرت شيبرد، إنه توصل إلى آلية تشرح كيف تعمل دلائل الموجات البصرية القابلة للتمدد كأجهزة استشعار للانحناء، والاستطالة، والضغط في اليد الروبوتية الرخوة، وفق ما نشرت مجلة «ساينس روبتيكس». وأجرى شيبرد طباعة حجرية ليد الروبوت على أربع خطوات، لإنتاج النواة (التي ينتشر عبرها الضوء)، والكسوة (السطح الخارجي للدليل الموجي)، التي تضم صمامات ثنائية باعثة للضوء «LED»، والثنائي الضوئي «photodiode».
وأوضح شيبرد أنه لم يفقد أي ضوء خلال ثني الطرف الاصطناعي، فلن نحصل على معلومات حول حالة المستشعر. إذْ يعتمد مقدار الخسارة على طريقة ثنيها. وذكر أن عملية التصنيع معقدة نوعاً ما، لكنّ ظهور الطباعة الحجرية والطباعة ثلاثية الأبعاد، جعل منها بسيطة عبر تسهيل إنتاجها ودمجها في تطبيق الروبوتات الرخوة. وفي الإطار ذاته، نشر في المجلة ذاتها دراسة قام عليها العالم الياباني هوشان زاهو تشمل التغذية العصبية الإلكترونية الضوئية لليد الاصطناعية باستخدام دلائل الموجات البصرية القابلة للتمدد. أوضح جاو أن غالبية الروبوتات لديها أجهزة استشعار خارج الجسم، تكتشف بها الأشياء، ولكن أجهزة استشعار الإنسان مندمجة ضمن الجسم، لاكتشاف القوى المنقولة عبر سمك الروبوت، بالطريقة نفسها التي نختبرها نحنُ وسائر الكائنات عندما نشعُر بالألم.